

You must be logged into @rhschools.org to access this folder.
|
Q1 At a Glance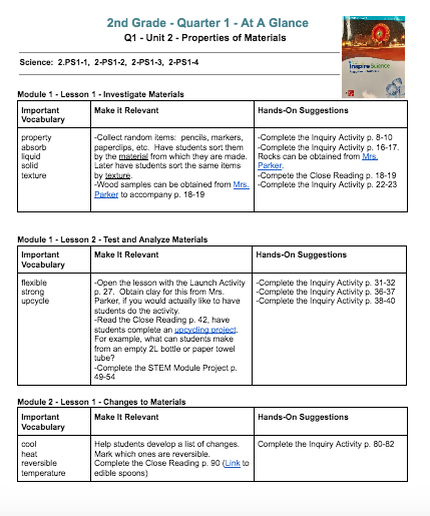
|
Q1 StandardsScience 2-PS1-1. Plan and conduct an investigation to describe, identify patterns, and classify different kinds of materials by their observable properties. 2-PS1-2. Analyze data obtained from tests to determine which materials have the best properties for an intended purpose. 2-PS1-3. *Make observations to construct an evidence-based account of how an object made of a small set of pieces can be disassembled and made into a new object. 2-PS1-4. Construct an argument with evidence that some changes caused by heating or cooling can be reversed and some cannot. |
Q2 At A Glance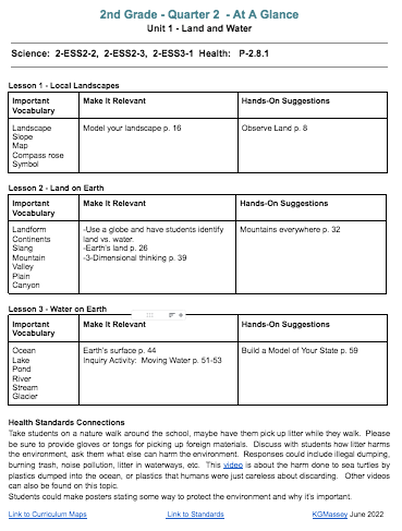
|
Q2 StandardsScience 2-ESS2-2. Develop a model to represent the shapes and kinds of land and bodies of water in an area. 2-ESS2-3. Obtain information to identify where water is found on Earth and that it can be solid or liquid. 2-ESS3-1. *Design solutions to address human impacts on natural resources in the local environment. Health P-2.8.1 Encourage others to protect and improve the environment. |
Q3 At A Glance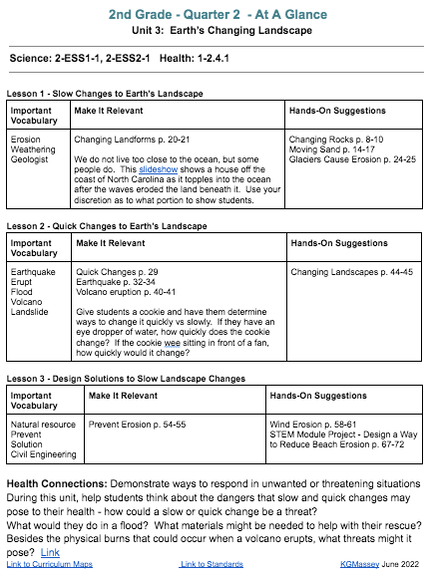
|
Q3 StandardsScience
2-ESS1-1. Use information from several sources to provide evidence that Earth events can occur rapidly or slowly. 2-ESS2-1. *Compare multiple solutions designed to slow or prevent wind or water from changing the shape of the land. Health I-2.4.1 Demonstrate ways to respond when in an unwanted, threatening, or dangerous situation. |
Q4 At A GlanceOrder your Living Materials! Pillbugs
Request sufficient pots and potting soil from Mrs. Parker! Marigold Seeds, Milkweed Seeds, Pumpkin Seeds, Radish Seeds, Red Maple Seeds. 
|
Q4 StandardsScience 2-LS2-1. Plan and conduct an investigation to determine if plants need sunlight and water to grow. 2-LS2-2. *Develop a simple model that mimics the function of an animal in dispersing seeds or pollinating plants. 2-LS4-1. Make observations of plants and animals to compare the diversity of life in different habitats. |
